|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||
5.2.3.3 Koračni motor |
|
|||||||||||||||||||||||||||||||
|
Na področju pogonov sodobnih, računalniško krmiljenih tehnologij pa je zelo pogosto potrebno natančno pozicioniranje1 (tiskalniki, risalniki, koordinatni vrtalniki, obdelovalni stroji … ). Potrebne premike za tako pozicioniranje omogočajo koračni motorji. |
|
|||||||||||||||||||||||||||||||
|
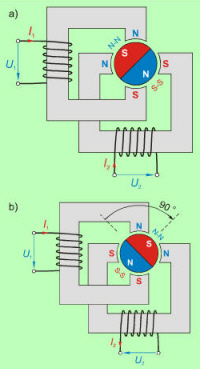
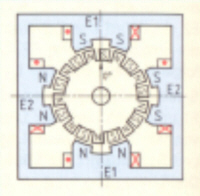
Slika 5.2.3.3.1 prikazuje najenostavnejšo izvedbo koračnega motorja. Rotor motorja je trajni magnet, katerega položaj določata para polov dveh elektromagnetov. Če elektromagnetu E2 s spremembo smeri toka spremenimo polariteto magnetnih polov, bo prvotno magnetno polje elektromagnetov naredilo zasuk za 90°. Posledično se bo natančno za enak kot zasukal tudi rotor motorja. Če potem na enak način spremenimo polariteto elektromagneta Ε1, bomo na enak način povzročili zasuk rotorja za nadaljnjih 90°. Enaki zasuki rotorja si lahko sledijo v poljubnem številu. Pravimo, da rotor motorja »koraka«, in od tod tudi naziv »koračni« motor. |
||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||
|
1 positio, lat. = položaj, iz ponere = postaviti |
||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||
|
|